CAN Interface¶
Pin |
Signal |
Description |
type |
I/O |
|---|---|---|---|---|
76 |
CAN1-TX |
This is the transmit signal to the CAN bus transceiver. |
VDDIO |
O |
81 |
CAN1-RX |
This is the receive signal from the CAN bus transceiver. |
VDDIO |
I |
34 |
CAN2-TX |
This is the transmit signal to the CAN bus transceiver. |
VDDIO |
O |
36 |
CAN2-RX |
This is the receive signal from the CAN bus transceiver. |
VDDIO |
I |
Module |
Remark |
|||
TX27, TX51, TX8M |
Not available – default functions are used on these pins. |
|||
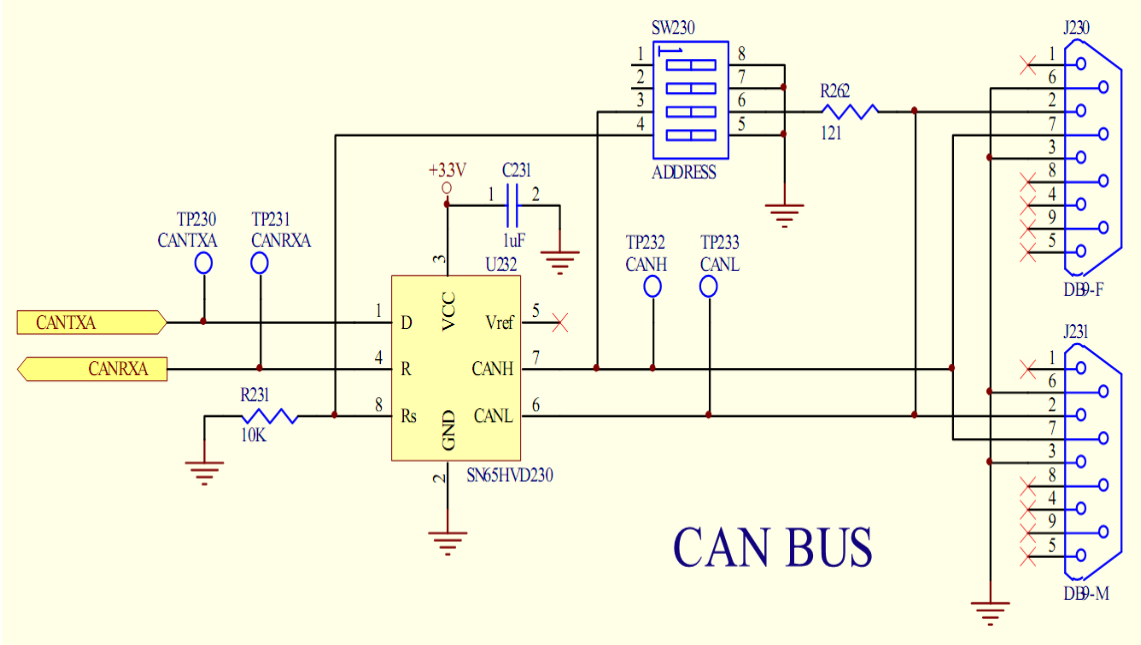
Some TX modules provides a FlexCAN communication controller that implements the CAN protocol according to the CAN 2.0B protocol specification. The CAN protocol was designed primarily (but not solely) to meet requirements suitable for a serial data bus in vehicle applications, including: real-time processing, reliable operation in the EMI environment of a vehicle, cost-effectiveness, and sufficient bandwidth. A CAN Transceiver is needed on the baseboard to connect the system to the CAN bus. The Texas Instruments SN65HVD23x operates with a single 3.3V supply and can be connected directly to the 3.3V TX modules: